Anthropic diz que Claude Opus 4.7 conclui tarefas de robótica 20x mais rápido que equipes humanas
Resultados do Project Fetch, fase dois, indicam que o Claude Opus 4.7 superou times humanos em tarefas com robôs quadrúpedes, com ganhos massivos de tempo e eficiência.
Danilo Gato
Autor
Introdução
Claude Opus 4.7 é a palavra-chave que marca um salto concreto na aplicação de IA a robótica. Em 18 de junho de 2026, a Anthropic publicou resultados do Project Fetch, fase dois, comparando o desempenho do modelo, sem ajuda humana, com equipes internas não especialistas da etapa anterior. O destaque foi direto, o Claude Opus 4.7 concluiu tarefas medidas no experimento até cerca de 20 vezes mais rápido que o melhor time humano do estudo anterior.
A relevância é imediata para operações que dependem de integração entre software e mundo físico. A avaliação incluiu conectar vídeo e lidar do robô, programar controle manual e visão, detectar o objeto alvo e consolidar os componentes em um fluxo funcional. Os números revelaram ganhos expressivos, inclusive mais de 18 vezes de vantagem média frente ao time humano assistido por uma versão anterior do Claude, em quatro tarefas comuns, e 37,7 vezes frente ao time sem acesso ao modelo.
Este artigo aprofunda como a Anthropic estruturou o teste, onde o Claude Opus 4.7 brilhou, onde ainda falha e o que isso significa para logística, inspeção industrial e equipes de engenharia que querem acelerar provas de conceito com robôs comerciais.
O que o Project Fetch, fase dois, realmente mediu
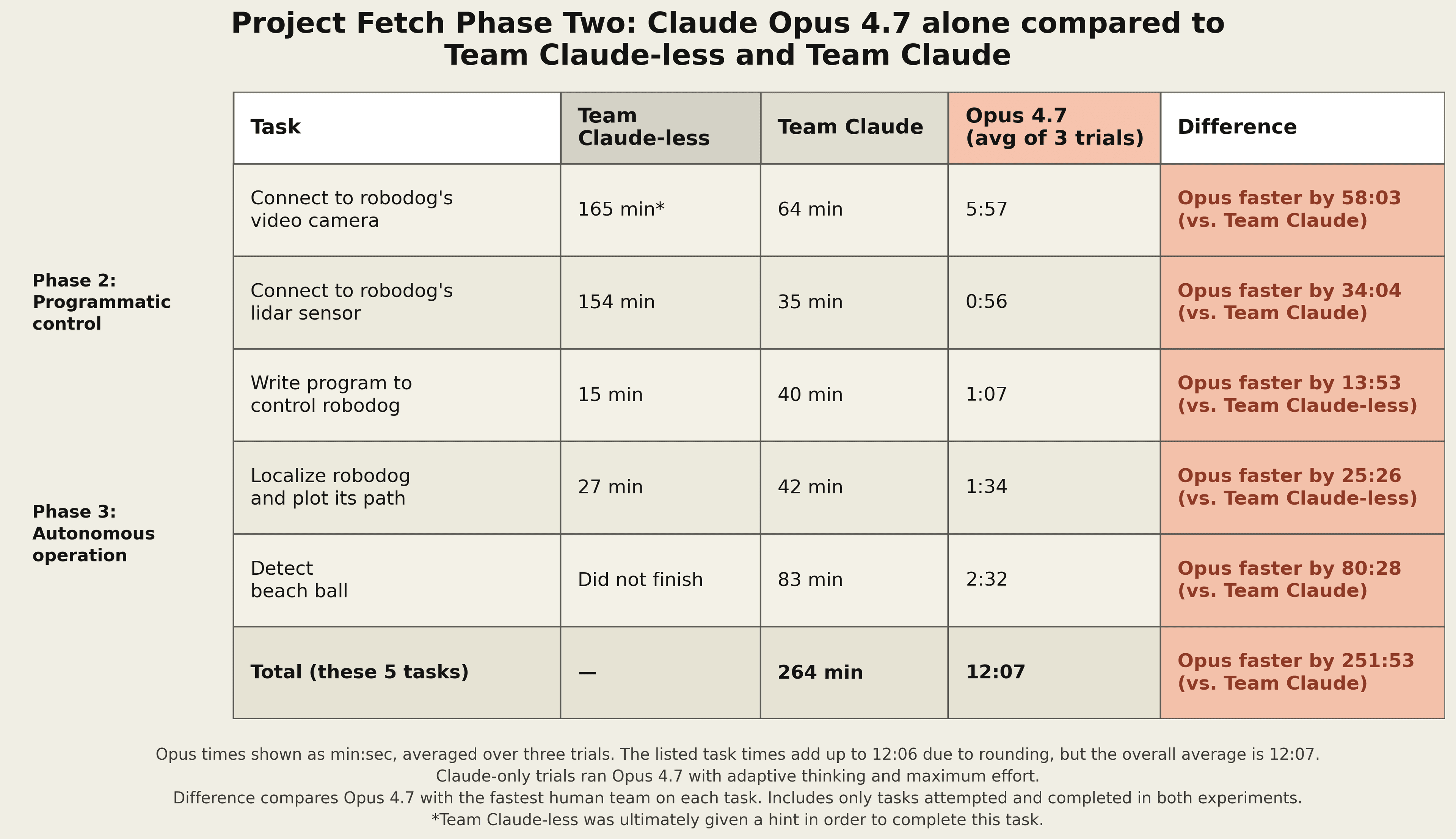
O Project Fetch original aconteceu com colaboradores não especialistas em agosto de 2025, divididos aleatoriamente em duas equipes, uma com acesso ao Claude e outra sem. A fase dois repetiu parte das etapas com uma diferença crucial, a execução principal ficou a cargo do Claude Opus 4.7, operando sem assistência humana direta nas decisões técnicas, com a intervenção limitada a inicialização do ambiente e aprovações de segurança. O conjunto de tarefas avaliou conexão à câmera do robô, conexão ao lidar, implementação de controle programático, telemetria e detecção do objeto.
Três rodadas com esforço máximo no Claude Code foram executadas. O tempo decorrido foi cronometrado para cada objetivo, e os autores realizaram avaliação qualitativa de sucesso. Em todas as etapas que pelo menos um time humano havia concluído na fase um, o Claude Opus 4.7 foi pelo menos dez vezes mais rápido. Quando o recorte ficou nas quatro tarefas que ambos os times humanos concluíram, a média foi de 18,9 vezes mais rápido que o time com Claude, e 37,7 vezes mais rápido que o time sem Claude, com um tempo total de 9 minutos e 35 segundos para o modelo, contra 181 minutos e 361 minutos, respectivamente.
Ganhos de velocidade, volume de código e escolha de abordagem
Os ganhos de tempo vieram acompanhados de um comportamento mais econômico no código, o Claude Opus 4.7 produziu cerca de 1.045 linhas frente a 10.309 do time com Claude e 1.136 do time sem Claude. O resultado sugere mais acerto de primeira e melhor seleção de caminhos técnicos. Em vez de explorar amplamente integrações possíveis, o modelo identificou rapidamente rotas mais eficazes para acessar sensores e orquestrar o pipeline.
Houve falhas, como a seleção inicial de um algoritmo de detecção de objetos desatualizado, que alongou uma das rodadas. Mesmo assim, a execução manteve variação baixa entre tentativas, o que reforça a confiabilidade dentro do escopo testado. O quadro final aponta para uma habilidade emergente, modelos de linguagem começam a operar ferramentas físicas prontas de mercado com pouco acoplamento, tendência semelhante ao que já ocorreu com ferramentas de software e automação de código.
![Comparativo de tempos do Project Fetch]
Limites atuais, precisão motora e o desafio do controle fino
A parte mais difícil continua na borda entre percepção, planejamento e controle fino. Na fase um, humanos, após prática, conseguiram empurrar a bola com o robô de forma relativamente suave, ajustando rapidamente trajetória e força a cada passo do ciclo sensoriamento-ação. Na fase dois, o Claude Opus 4.7 também posicionou o robô para empurrar a bola, porém o controle foi pouco preciso e o objetivo final de retorno autônomo ao ponto inicial não foi atingido nas tentativas reportadas. Um pesquisador com mais experiência em robótica conseguiu programar a recuperação autônoma, sinal de que com mais tempo e andaimes de engenharia o modelo pode chegar lá, mas ainda não entrega a mesma destreza de um operador humano treinado.
Esse limite técnico importa porque muitas aplicações industriais exigem controle robusto com feedback rápido, como manipulação delicada, acoplamento de conectores, inspeção com contato e navegação em ambientes dinâmicos. O Claude Opus 4.7 avança o estado da arte em tarefas de integração, visão e orquestração em alto nível, porém a síntese de políticas de controle de baixo nível, sensíveis a ruído e latência, segue como fronteira de pesquisa.
O que muda na prática para times de engenharia e operações

A principal mudança está no custo de oportunidade. Conectar sensores, montar um pipeline de visão e telemetria, criar controladores básicos e validar a malha de dados sempre consumiu horas de engenheiros. O Claude Opus 4.7 reduz essa etapa de bootstrapping a minutos em cenários similares ao estudo, o que libera tempo para foco em testes, segurança operacional e metas de produtividade. Em operações, isso se traduz em provas de conceito mais rápidas para tarefas como monitoramento de estoque com robôs quadrúpedes, mapeamento de áreas internas com lidar e validação de rotas seguras em turnos noturnos.
A cultura de desenvolvimento também muda. O estudo mostra que o modelo gera menos código, mais direto e com maior taxa de acerto inicial. Times podem adotar uma cadência de engenharia orientada por objetivos, com o Claude Opus 4.7 propondo integrações e frameworks mínimos viáveis, enquanto especialistas reforçam camadas de robustez, testes e conformidade. Esse equilíbrio tende a reduzir retrabalho, já que decisões arquiteturais nascem de iterações mais curtas e mensuráveis.
Como avaliar riscos e governança no caminho para agentes físicos
Ganhos de velocidade não eliminam obrigações de segurança. A Anthropic contextualiza avanços em agentes com iniciativas como Project Glasswing e documentação de modelos mais recentes, que incluem salvaguardas e orientações para uso responsável em tarefas com maior impacto. Ao migrar protótipos para ambientes reais, o desenho do processo precisa contemplar aprovação de comandos, logs auditáveis, limites de operação, zonas de segurança e simulações prévias sempre que possível.
Para equipes que querem experimentar, a recomendação prática é estabelecer checklists de prontidão. Liste o hardware e APIs do robô, confirme drivers e permissões, prepare dados de calibração de câmeras, defina métricas de sucesso e janelas de rollback. Execute o Claude Opus 4.7 com esforço elevado apenas quando necessário, monitore tempo, custo e qualidade de código gerado. Quando uma etapa exigir controle fino e resposta em milissegundos, considere um híbrido, planejamento e visão com o modelo, política de controle dedicada com biblioteca comprovada em tempo real.
![Pipeline de visão e telemetria em teste de robô]
Benchmarks são um ponto de partida, não um fim
É tentador extrapolar que Claude Opus 4.7 resolverá qualquer tarefa robótica. Os próprios autores do estudo são claros, o resultado não significa que LLMs já solucionaram robótica. O que os dados mostram é aceleração real em tarefas de integração e percepção para um robô comercial, dentro de um escopo específico. O valor para negócios emerge quando essa aceleração encurta ciclos de aprendizado, reduz tempo de configuração e cria base para produtos viáveis em logística interna, inspeções e segurança patrimonial.
Outro ponto essencial é a linha do tempo. Em 2025, durante a fase um, até o acesso ao Claude já turbinava equipes humanas, mas o próprio Claude 4.1 não conseguia, sozinho, sair do zero e conectar-se ao robô com sucesso. Menos de um ano depois, a fase dois mostra o Claude Opus 4.7 operando o pipeline de forma autônoma e batendo as equipes humanas em tempo por ampla margem. O ritmo de avanço requer métodos de avaliação contínuos e políticas de atualização cuidadosas para ambientes de produção.
O que observar nos próximos meses
Quatro vetores merecem atenção. Primeiro, robustez fora do laboratório, já que poeira, luz variável e redes instáveis são a norma em campo. Segundo, interfaces padrão de robôs e sensores, que podem se beneficiar de adapters gerados pelo Claude Opus 4.7, reduzindo esforço manual na integração. Terceiro, segurança cibernética e física, especialmente em rotinas que envolvem movimento autônomo em áreas compartilhadas. Quarto, frameworks de simulação e validação, úteis para testar políticas de controle antes de liberar em hardware real.
A Anthropic indica que esses saltos não vieram de foco específico em robótica, e sim de escalonamento geral de modelos e evolução de capacidades de raciocínio e planejamento. Se essa tendência se mantiver, mais empresas conseguirão validar cenários com robôs de prateleira em dias, não em trimestres. Isso abre espaço para pilotos em armazéns, terminais, usinas e canteiros de obras com metas claras, redução de riscos e cronogramas realistas.
Conclusão
Os resultados do Project Fetch, fase dois, colocam o Claude Opus 4.7 como acelerador prático para tarefas de integração e percepção em robótica comercial. A combinação de menos código, mais acerto e tempos de execução até dezenas de vezes menores altera a economia de prototipagem e prova de conceito. A partir daqui, a curva de aprendizado pode se deslocar para testes de robustez, segurança e controle fino, próximos do que o campo exige para escalar.
A mensagem final é pragmática. Claude Opus 4.7 não substitui engenharia de controle especializada, porém já reduz drasticamente o tempo até um pipeline funcional. Em equipes enxutas, isso significa mais ciclos de teste e melhor alocação de especialistas. Em operações consolidadas, cria uma camada de automação que encurta filas de integração. A transição para agentes físicos começa com passos assim, mensuráveis e com impacto direto no relógio e no orçamento.