IA do MIT dá memória de longo prazo a robôs em tempo real
Pesquisadores do MIT apresentam o DAAAM, um sistema de memória espacial e temporal que permite a robôs lembrar o que viram, onde e quando, respondendo perguntas complexas em linguagem natural, com desempenho de tempo real.
Danilo Gato
Autor
Introdução
IA do MIT dá memória de longo prazo a robôs em tempo real, e isso muda o jogo na interação com ambientes grandes e dinâmicos. Em 17 de junho de 2026, o MIT detalhou um framework de memória que permite a robôs formar e lembrar um modelo mental detalhado do que viram, onde e quando, rápido o bastante para uso em plataformas móveis. O sistema associa descrições ricas a mapas 3D e responde perguntas em linguagem natural com ganhos de desempenho significativos.
A novidade, batizada de DAAAM, foi apresentada junto a resultados que mostram melhorias expressivas em benchmarks de perguntas e respostas espaçotemporais e em tarefas de navegação sequencial. O trabalho foi mostrado na CVPR e traz números que chamam atenção, como até 53,6% de ganho em acurácia em perguntas e 27,8% em grounding de tarefas, além de uma otimização que acelera em cerca de dez vezes a geração de descrições, viabilizando o tempo real.
O que é o DAAAM e por que importa agora
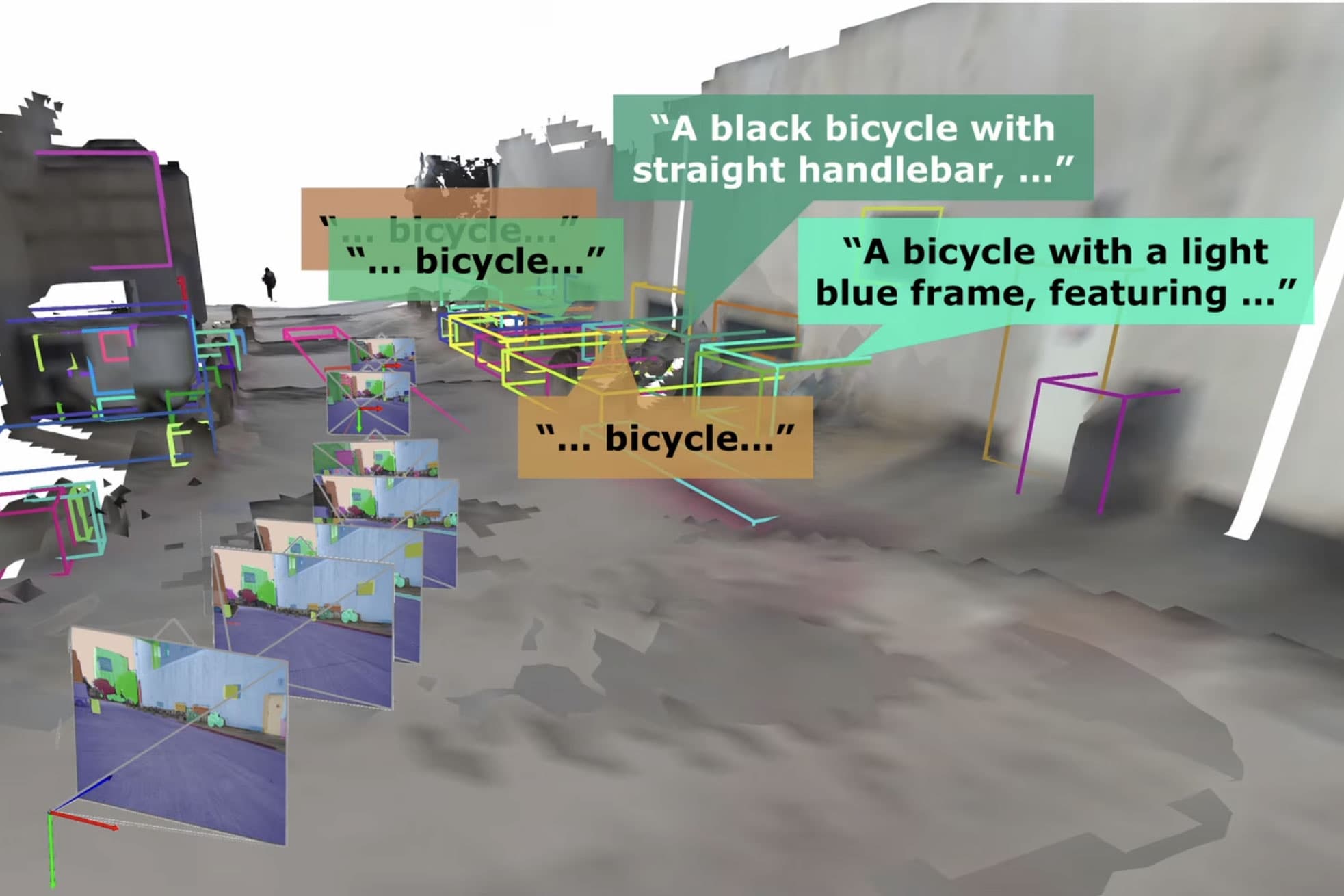
O DAAAM, sigla para Describe Anything, Anywhere, at Any Moment, combina duas frentes clássicas da robótica e visão computacional, mapeamento 3D e entendimento semântico, para construir uma memória explícita ao longo do tempo. O sistema recebe um fluxo de RGB‑D, segmenta e rastreia objetos, reconstrói a geometria em 3D e, em paralelo, gera descrições abertas detalhadas, tudo vinculado a timestamps e posições no mapa. Em vez de anotar cada quadro isoladamente, o método seleciona quadros ideais por objeto e processa lotes de fragmentos de uma só vez, reduzindo custo computacional e mantendo consistência espacial e temporal.
Essa arquitetura resolve um gargalo recorrente. Abordagens ricas em semântica via modelos multimodais costumam falhar no tempo real quando precisam anotar muitos objetos por longos períodos, enquanto mapeamento rápido perde expressividade para responder perguntas como “onde estava a chave vermelha ontem à tarde”. O DAAAM equilibra essas demandas, permitindo queries como “onde está o carrinho de ferramentas que tinha o alicate azul” e “quando a porta do laboratório ficou aberta pela última vez”.
Resultados, métricas e o que os números dizem
Os autores relatam ganhos robustos em benchmarks públicos. No OC‑NaVQA, as melhorias chegam a 53,6% em acurácia de perguntas sobre objetos, com reduções de 21,9% no erro de posição e 21,6% no erro temporal. Em tarefas sequenciais do SG3D, o método melhora o grounding em 27,8% frente aos melhores baselines. Esses números não são apenas acadêmicos, traduzem maior capacidade de lembrar, localizar e datar eventos no mundo real. Além disso, a estratégia de seleção de quadros e anotação em lote proporciona aceleração de uma ordem de grandeza na etapa mais cara, a descrição aberta de objetos, o que sustenta a operação em tempo real.
Do ponto de vista prático, o MIT reporta que o framework responde perguntas com mais acerto que métodos de estado da arte e com latência compatível para robôs móveis, graças a um agente com chamador de ferramentas que faz buscas semânticas e por localização, mitigando alucinações na recuperação. O anúncio oficial destaca o potencial para assistência em fábricas, manutenção com realidade aumentada e navegação cotidiana em campi e prédios complexos.
Como funciona por dentro, do sensor ao “lembro onde vi isso”
A pipeline do DAAAM pode ser entendida em três blocos. Primeiro, um frontend de segmentação e rastreamento cria fragmentos de objetos persistentes, atualizados a 10 Hz, a taxa do sensor. Em seguida, uma otimização escolhe quadros de alta qualidade por objeto e processa todos de uma só vez com um modelo de legendas detalhadas, o Describe Anything Model, anexando descrições ricas e embeddings semânticos. Por fim, um backend organiza tudo em um scene graph 4D hierárquico, alinhando espacial e temporalmente as observações e mantendo históricos de descrições por entidade, o núcleo da memória. O agente LLM consulta esse grafo via ferramentas de busca e responde em linguagem natural.
Essa engenharia atende à tríade crítica da memória robótica, precisão geométrica para manipulação e navegação, riqueza semântica para instruções naturais, eficiência computacional para tempo real. Mecanismos tradicionais sacrificavam sempre um desses pilares. O DAAAM mostra que os três podem conviver, desde que a semântica seja produzida de forma ativa, seletiva e em lote, e que o armazenamento preserve coerência espaciotemporal por objeto.
![Mapa 4D com descrições semânticas em objetos vistos pelo robô]
Aplicações imediatas, de chão de fábrica a hospitais
Cenários de alto valor já aparecem no comunicado oficial. Em fábricas, robôs podem recuperar componentes deixados horas antes em posições específicas. Em manutenção e facilities, a mesma memória serve de base para realidade aumentada que indica anomalias e mudanças de estado de equipamentos, com referência de quando ocorreram. Na logística interna, o histórico de onde e quando objetos foram vistos permite rastrear fluxos sem instalar infraestrutura dedicada. Todos esses casos exigem consultas que misturam o que, onde e quando, precisamente o espaço em que o DAAAM se destaca.
Do lado da pesquisa, o trabalho foi apresentado na CVPR e disponibilizado como preprint, com a promessa de código e dados abertos. A abertura é importante para que a comunidade valide, estresse e estenda o sistema para ambientes mais desafiadores e plataformas diversas, algo que costuma acelerar a curva de maturidade rumo a produtos.
Como o DAAAM se conecta às tendências de memória em robótica
A corrida por memória de longo prazo não nasceu no DAAAM. Em 2024 e 2025, surgiram sistemas que tentavam levar memória a agentes e robôs, como ReMEmbR, voltado a navegação com memória espaciotemporal de longos horizontes, e KARMA, que propõe camadas de memória curta e longa plugáveis em agentes incorporados, com demonstrações em robôs reais. Esses projetos enfatizam que sem memória escalável, agentes VLA perdem consistência em tarefas acima de alguns minutos. O DAAAM entra nesse cenário como uma peça integrada, explícita e rápida, com ganhos mensuráveis em benchmarks relevantes.
Outro vetor é a avaliação padronizada do que significa “lembrar” em robótica. Surgem benchmarks dedicados a memória de manipulação e longa duração, sinalizando que a comunidade enxerga memória como gargalo estrutural, não mero detalhe de engenharia. Essa pressão por métricas realistas tende a consolidar arquiteturas híbridas, que combinem memória visual densa de curto prazo com memória semântica comprimida de longo prazo, uma taxonomia em que o DAAAM se encaixa naturalmente.
Limitações, trade-offs e o que precisa evoluir
Os próprios autores listam pontos frágeis. O modelo de descrição pode errar em objetos incomuns ou completar detalhes por suposição, sinal de que a semântica ainda herda vieses dos dados. A velocidade atual atende bem a robôs terrestres, porém pode ficar abaixo do necessário em drones, onde a dinâmica e a cadência de quadros são mais altas. Em usos muito prolongados, o histórico de descrições por entidade pode crescer a ponto de exigir estratégias de sumarização e compactação. São desafios compatíveis com um sistema emergente, e esclarecem onde investir para robustez operacional.
No plano sistêmico, há um trilema prático em robótica incorporada, desempenho cognitivo de ponta, resposta determinística em tempo real e autonomia plena em bordo, competem por energia e memória que cabem no robô. Por isso, soluções viáveis tendem a diluir processamento entre bordo e nuvem, e a manter os estados críticos compactos. Memória eficiente, consultas baratas e compressão inteligente viram componentes tão fundamentais quanto cache e indexação em sistemas de dados. Esse movimento já aparece em declarações de líderes da área, apontando memória como peça arquitetural padrão ao lado de recuperação por contexto.
![Scene graph com pontos de interesse e referências temporais]
Como começar, passos práticos para times de robótica
- Mapear casos de uso que exigem perguntas com o que, onde e quando. Se a operação depende de localizar itens vistos minutos ou horas antes, memória espaciotemporal é um multiplicador imediato de valor.
- Pilotar em ambientes reais com trajetórias longas. Benchmarks ajudam, porém validar em planta, hospital ou campus revela requisitos de latência, volume de objetos e dinâmicas de oclusão que guiam ajustes de parametrização.
- Medir com métricas alinhadas ao problema. Adotar conjuntos como NaVQA e SG3D para QA e grounding, e incluir KPIs operacionais, tempo de resposta por query, sucesso na sequência de waypoints e atualização incremental do mapa.
- Planejar compactação e higiene de memória desde o início. Definir políticas de sumarização, expiração e reconciliação de entidades para evitar crescimento descontrolado do histórico.
- Prototipar o agente de consulta com ferramentas de busca híbridas. Combinar busca semântica por texto com busca por localização acelera respostas e reduz alucinações em perguntas contextualizadas.
Comparando com outras abordagens de memória para robôs
- Memória baseada em frames: facilita implementação com bases vetoriais e RAG, mas sofre em perguntas que exigem consistência 3D e temporal. O DAAAM evita isso ao reconciliar observações no grafo 4D.
- Memória multimodal híbrida: linhas como ReMEmbR e KARMA já mostraram ganhos ao combinar vídeo curto prazo e símbolos longo prazo. O DAAAM valida essa direção com ênfase em grounding geométrico e operação contínua.
- Sistemas de auto‑modelo corporal: avanços como os campos jacobianos neurais, que dão autoconsciência cinemática a robôs com uma câmera, complementam a memória ambiental do DAAAM, abrindo caminho para controle mais adaptativo combinado com lembrança do contexto.
Integração com ecossistemas e ferramentas emergentes
Projetos e bibliotecas dedicados a memória persistente para robôs começam a amadurecer, desenhados para rodar em loops de controle em tempo real, com APIs para armazenar experiências, cenas e episódios. Essa camada de infraestrutura reduz atrito para equipes, integrando simulação, replay e transferência de habilidades entre ambientes, fatores essenciais em lifecycles de aprendizado contínuo.
No lado acadêmico, há um pipeline de pesquisa ativo em memória de agentes e robôs, de coleções de longo contexto a arquiteturas inspiradas em neurociência, sugerindo que sistemas práticos tendem a combinar múltiplos tipos de memória em módulos especializados. O DAAAM adiciona uma peça espaciotemporal forte a esse mosaico, encaixando-se em arquiteturas de agentes que planejam, percebem e recordam ao longo de minutos e horas.
Conclusão
Memória de longo prazo em tempo real deixa de ser promessa e ganha corpo em resultados replicáveis. O DAAAM mostra que é possível construir uma memória que entende objetos, lugares e momentos, com ganhos expressivos em perguntas e navegação, e latência compatível com robôs móveis. Essa base tecnológica abre espaço para operações mais autônomas e colaborativas em cenários críticos como indústria, saúde e educação.
O próximo passo envolve tornar a memória mais robusta a objetos raros, acelerar ainda mais a semântica para plataformas rápidas e adotar políticas de sumarização que mantenham o histórico útil sem crescer indefinidamente. A direção está clara, arquiteturas de agentes e robôs competitivos vão tratar memória como pilar central, ao lado de percepção e planejamento, e o DAAAM surge como referência concreta desse novo padrão.
Leia também
Nvidia investe no Safe Superintelligence de Ilya Sutskever, substituindo TPUs do Google por GPUs
Nvidia investe no Safe Superintelligence de Ilya Sutskever e firma uma parceria que promete ampliar em magnitude o acesso a computação de ponta. O movimento indica uma guinada do SSI em direção a GPUs da Nvidia, após rodadas com TPUs do Google. Entenda como isso muda o tabuleiro de IA, os números por trás do acordo e o que esperar do ecossistema Rubin.
12 min de leituraInteligência ArtificialGoogle lança Lyria 3.5 no Flow Music, melhor voz, letras e controle
Lyria 3.5 foi lançado em 29 de julho de 2026 e já está disponível no Google Flow Music, com melhorias evidentes em musicalidade, letras, vocais e controle criativo. O modelo amplia a precisão de prompts, melhora a pronúncia e a emoção nos cantos e permite ajustar tempo e duração. Com SynthID, todo áudio sai com marca d’água inaudível para dar transparência.
9 min de leituraInteligência ArtificialIdeogram lança Object Remover e afirma topo no RemovalBench
O Ideogram Object Remover estreia com a promessa de liderar o benchmark RemovalBench, sinalizando avanços concretos na edição de imagens com IA. Além do foco na remoção fiel e na preservação de contexto, a Ideogram conecta o recurso ao seu stack 4.0, que já inclui Background Remover com API e ferramentas de inpainting. Entenda o valor prático, como medir qualidade e quando usar essa abordagem no seu fluxo.
9 min de leituraInteligência ArtificialOpenAI dá acesso grátis do ChatGPT a 100 mil pesquisadores
OpenAI lança um programa que concede acesso gratuito aos modelos mais avançados do ChatGPT para pesquisadores acadêmicos. O plano começa com 10 mil vagas no verão de 2026, meta de 100 mil até 2027, suporte a privacidade empresarial e treinamentos. Entenda como funciona, o que inclui, requisitos e impactos para a pesquisa.
10 min de leitura