OpenAI Robotics contrata engenheiros para criar robôs úteis
OpenAI amplia a aposta em IA encarnada com vagas em hardware, sistemas e ML, foco inicial em apoiar trabalhadores de infraestrutura e visão de robô pessoal no longo prazo.
Danilo Gato
Autor
Introdução
OpenAI Robotics anunciou a contratação de engenheiros para construir robôs úteis, com foco em talentos de hardware full stack, operações, sistemas e aprendizado de máquina. A mensagem, publicada em 31 de maio de 2026 no X por Sam Altman, descreve objetivos de curto prazo, apoiar trabalhadores qualificados em infraestrutura, e de longo prazo, robôs pessoais capazes de realizar qualquer tarefa necessária. Também revela que o programa interno de pesquisa em simulação de mundo, liderado por Aditya Ramesh, evoluiu ao longo do último ano para o grupo OpenAI Robotics.
OpenAI Robotics é a palavra-chave por trás de uma inflexão estratégica, sair do software puro para disputar a próxima fronteira, a IA no mundo físico. As páginas de carreira da empresa já listam funções específicas para o time de robótica, incluindo engenharia de sistemas distribuídos e papéis dedicados a sensores, atuadores, integração e coleta de dados.
O que exatamente foi anunciado e por que importa
O post de Altman detalha três pontos com impacto direto no mercado:
- Contratação de perfis excepcionais em hardware, operações, sistemas e ML, reforçando a estratégia de co-projetar hardware e pesquisa em ML.
- Plano em duas fases: no curto prazo, robôs para apoiar profissionais de infraestrutura, no longo, visão de robô pessoal.
- A formalização do time, OpenAI Robotics, nascido do esforço de simulação de mundo, agora com Aditya Ramesh como liderança técnica.
Essa combinação sugere uma plataforma completa, do design do atuador ao pipeline de dados e ao controle em tempo real, em vez de apenas acoplar modelos de linguagem a um corpo genérico. O histórico público da OpenAI em simulação e transferência sim-to-real, publicado em trabalhos como “Video generation models as world simulators”, cria um lastro técnico para a ambição atual de robôs úteis.
Por que agora, o que mudou no cenário de robótica
Três ondas convergem:
- Modelos multimodais e de vídeo mais fortes, que funcionam como simuladores do mundo e dão base para planejamento e controle.
- Queda de custo de sensores e amadurecimento de ferramentas de simulação, acelerando iteração e coleta de dados.
- Uma corrida por talento em robótica encarnada, com humanoides e braços colaborativos ganhando tração em manufatura, logística e utilidades. Listagens recentes indicam que a OpenAI já abriu diversas posições dedicadas em São Francisco, incluindo engenharia de dados distribuídos para robótica e funções voltadas a integração e coleta de dados.
Ao mesmo tempo, a dinâmica competitiva se intensificou. Figure AI, que chegou a anunciar parceria e investimento da OpenAI, encerrou a colaboração em 2025 e migrou para modelos próprios, sinalizando que provedores de IA e fabricantes de robôs caminham para competir verticalmente. Relatos e notas da imprensa especializada documentam essa virada e o argumento de que LLMs ficaram mais comoditizados enquanto o desafio está no controle de alto regime do robô.
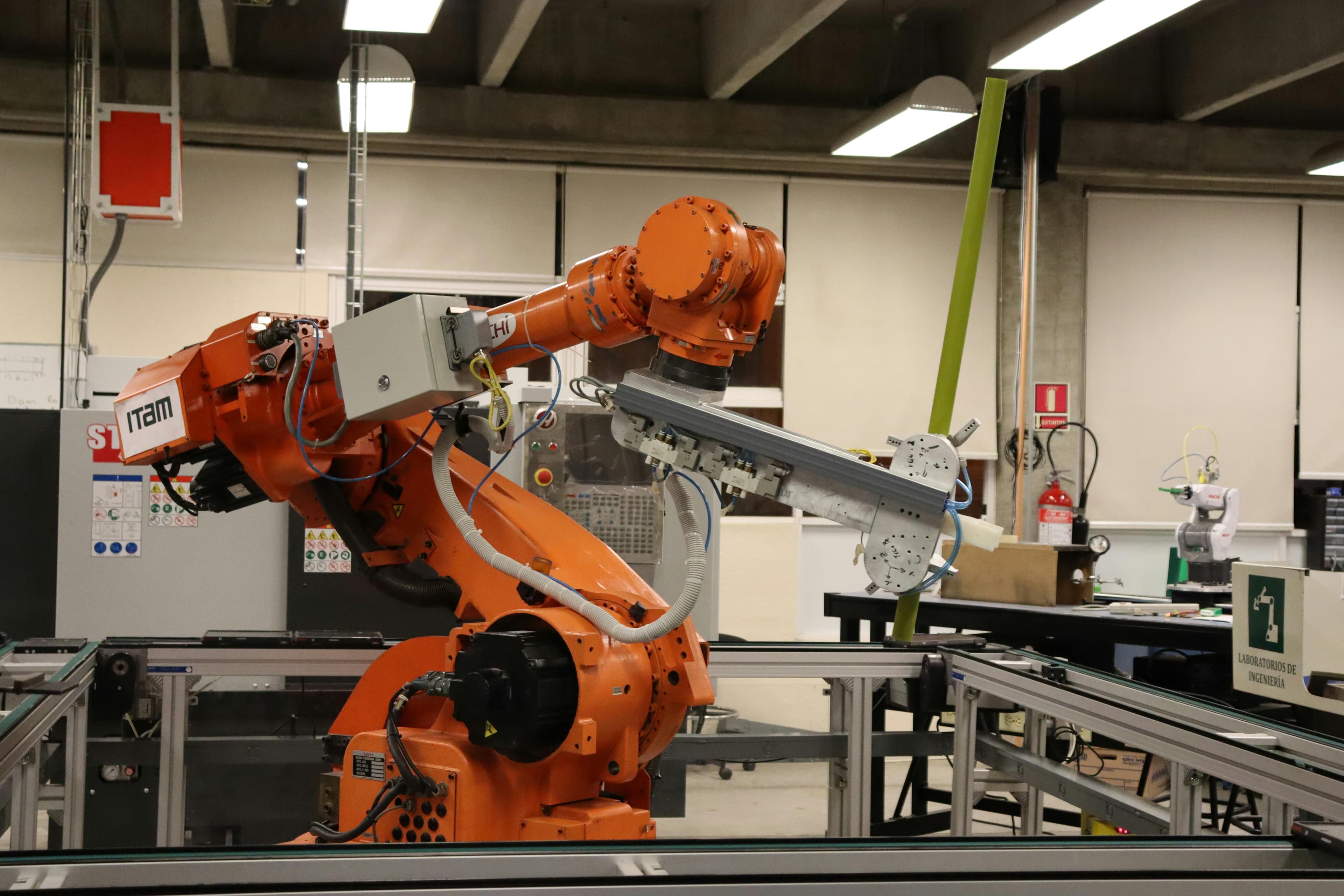
![Braço robótico em ambiente de laboratório]
O plano em duas fases, aplicações práticas e implicações
Infraestrutura primeiro. A indicação de apoiar trabalhadores qualificados sugere aplicações em canteiros de obras, utilidades, inspeção, manutenção de ativos e tarefas perigosas ou repetitivas. É um recorte pragmático: fluxos semi-estruturados, ganhos claros de segurança e produtividade, e um ciclo de feedback rico para coleta de dados operacionais. Essa leitura está alinhada com o texto do anúncio no X, que destaca explicitamente a infraestrutura como alvo inicial.
No longo prazo, a visão de “todo mundo com um robô pessoal” exige resolver navegação doméstica, manipulação fina, segurança, privacidade e custo total de propriedade. O caminho provável, olhando o ecossistema, é começar com braços e plataformas móveis em ambientes controlados, depois expandir para residências conforme os modelos multimodais ganham robustez e a simulação produz políticas mais generalistas. O histórico da OpenAI com simulação e generalização sim-to-real reforça essa trajetória incremental.
O que diferencia a abordagem, co-design hardware e ML
Co-desenhar hardware, sensores, atuadores, eletrônica de potência e o stack de ML muda o jogo.
- Permite instrumentação pensada para dados de treinamento e validação, desde o início.
- Maximiza controle de latência, sincronização de sensores e orquestração de políticas de controle em tempo real.
- Evita gargalos de integração quando se tenta acoplar um modelo genérico a um robô de terceiros.
As vagas públicas mencionam engenharia de sistemas distribuídos, o que sugere uma ênfase em pipelines escaláveis de dados e treinamento contínuo, além de uma infraestrutura para simulação massiva e avaliação. Isso está refletido nas páginas de carreira, com cargos ligados a Robótica e dados distribuídos.
Há também a pista do “mundo simulado” evoluindo para Robotics sob liderança de Aditya Ramesh, coautor em trabalhos de simulação de vídeo, o que indica uma estratégia na qual pré-treinamento em vídeo e simulação alimenta controle e planejamento no robô físico.
![Robô industrial em célula de manufatura]
O mercado que espera por isso, concorrentes e referências
O anúncio coloca a OpenAI frente a frentes já aquecidas. Tesla Optimus, Figure AI, 1X, Agility, Physical Intelligence, além de integradores de automação de armazéns e manufatura, travam hoje a disputa por engenheiros que dominam calibração, fusão de sensores, realismo de simulação, controle em tempo real e pipelines de dados robóticos. Reportagens recentes mapeiam essa corrida e detalham que há dezenas de vagas na OpenAI voltadas a essa pilha.
A ruptura com a Figure em 2025 ajuda a explicar por que a OpenAI quer mais autonomia de hardware e dados. TechCrunch registrou a saída da parceria, enquanto páginas enciclopédicas resumem a justificativa, LLMs mais comoditizados, e a mudança de foco para controle de alto regime e modelos embarcados específicos.
Por outro lado, a validação de que modelos de propósito geral podem ajudar na camada de raciocínio e interação do robô veio de várias frentes em 2024 e 2025. Essa tendência sustentou rodadas de capital bilionárias, ampliando o espaço de P&D e encurtando o ciclo entre protótipos e pilotos industriais.
Ética, segurança e governança, lições recentes
A expansão para robôs úteis também abre frentes sensíveis. Em março de 2026, a líder de robótica e hardware de consumo da OpenAI, Caitlin Kalinowski, renunciou após o anúncio de um acordo com o Departamento de Defesa dos EUA, manifestando preocupações com salvaguardas sobre vigilância e autonomia letal. A cobertura internacional destacou o episódio e a necessidade de governança mais clara em aplicações que tocam o mundo físico.
Esse contexto reforça duas exigências para qualquer robô pessoal ou industrial assistido por IA:
- Red lines explícitas e auditáveis sobre uso militar, vigilância doméstica e decisões sem humano no loop.
- Arquiteturas privacy-by-design, desde o firmware até o pipeline de dados, com processamento local quando possível e controles de consentimento granulares.
A capacidade de traduzir princípios em práticas auditáveis será tão crítica quanto o avanço técnico do stack de controle e percepção.
O que observar nos próximos 12 meses
- Publicações técnicas e demos de sim-to-real: indicadores de maturidade do controle, planejamento e manipulação, especialmente em tarefas de montagem leve e inspeção.
- Ferramentas e políticas de coleta de dados: descrição de laboratórios, dispositivos de aquisição e protocolos de segurança ocupacional.
- Roadmap de hardware: sinais sobre escolha de plataformas, humanoide completo ou braços colaborativos montados em bases móveis.
- Parcerias: fornecedores de sensores, atuadores, eletrônica, e possíveis pilotos com utilities e construtoras.
As páginas de carreira e os comunicados secundários já servem como termômetro, listando papéis como engenharia de dados distribuídos para Robótica e vagas ligadas a simulação e integração de sensores.
Como equipes podem se preparar, aplicações práticas agora
Equipes de tecnologia e operações interessadas em se beneficiar dessa nova leva de robôs úteis podem começar por três frentes práticas:
- Mapear processos candidatos: tarefas com alto volume, riscos ocupacionais ou restrições de precisão.
- Preparar dados: capturar vídeos, telemetria e anotações operacionais padronizadas para alimentar simulação e treino.
- Pilotos em células controladas: começar com braços colaborativos em estações bem definidas, medindo MTBF, taxa de sucesso por tarefa e ROI incremental.
O anúncio de Altman privilegia exatamente esse caminho, primeiro aplicações que apoiam trabalhadores, depois a ambição do robô pessoal. Essa cadência facilita a coleta de dados de qualidade, reduz riscos de segurança e cria tração operacional antes de buscar generalidade total.
Reflexões e insights finais
A disputa por IA encarnada parecia, até 2023, distante para laboratórios de software. Em 2026, virou corrida aberta. O anúncio da OpenAI tem dois recados claros: robôs úteis exigem co-projeto entre hardware e ML, e o ciclo virtuoso de simulação, dados e validação no mundo real decide a partida.
Também fica evidente que governança não é rodapé. As renúncias, os debates públicos e o escrutínio sobre usos governamentais servem de alerta para qualquer empresa que mira robôs em casas e canteiros. Sem compromissos claros, auditáveis e verificáveis, a adoção patina, por melhor que seja o demo.
Conclusão
OpenAI Robotics contrata para construir robôs úteis em um arco ambicioso. No curto prazo, apoiar trabalhadores de infraestrutura, no longo prazo, robô pessoal. Há base técnica em simulação e uma estratégia de co-design capaz de reduzir atritos de integração. O tabuleiro competitivo é duro, mas a empresa chega com modelos, compute e, agora, uma trilha clara de hardware e sistemas.
O sucesso vai depender do que sempre define robótica no mundo real, dados bons, iteração rápida, segurança e ROI. Some governança séria e diálogo transparente sobre limites de uso, e a tese de “robôs úteis” deixa de ser promessa e vira rotina operacional.
![Engenheiros testando braço colaborativo]